






Cферы применения робота:
-
Склады и логистика
-
Строительство и производство
-
Нефтегазовая отрасль
-
Охрана и безопасность
-
Образование по робототехнике
Сроки окупаемости:
Срок окупаемости роботов Boston Dynamics Atlas
оптимально 18-36 месяцев (1,5 - 3 года)
в зависимости от сферы применения роботов


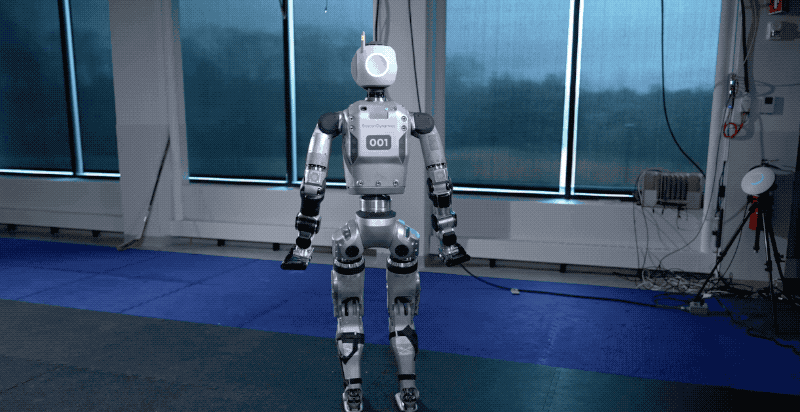
Описание робота:
Boston Dynamics Atlas представляет собой передовой гуманоидный робот, разработанный для выполнения сложных физических задач в разнообразных и непредсказуемых средах. Этот впечатляющий робот высотой 1,85 метра и весом около 80 кг воплощает в себе последние достижения в области робототехники, искусственного интеллекта и динамического управления движением.
Boston Dynamics Atlas обладает уникальной способностью перемещаться по неровным поверхностям, преодолевать препятствия, манипулировать объектами и даже выполнять акробатические элементы, что делает его одним из самых продвинутых гуманоидных роботов в мире. Корпус Atlas изготовлен из высокопрочных легких композитных материалов и авиационных алюминиевых сплавов, обеспечивающих оптимальное сочетание прочности, жесткости и малого веса, необходимых для динамичных движений. Специально разработанная защитная оболочка обеспечивает устойчивость к внешним воздействиям, включая пыль, влагу и механические удары, что позволяет роботу работать в различных условиях окружающей среды. В основе Atlas лежит мощная вычислительная платформа с многоядерными процессорами и специализированными нейронными ускорителями, обеспечивающими обработку сложных алгоритмов компьютерного зрения, планирования движений и адаптивного управления в режиме реального времени. Бортовая система обрабатывает терабайты данных в секунду, позволяя роботу мгновенно реагировать на изменения окружающей среды и поддерживать равновесие даже при значительных внешних воздействиях.
Boston Dynamics Atlas оснащен передовой системой гидравлических и электрических приводов с 28 степенями свободы, обеспечивающими исключительную подвижность и точность движений. Каждый сустав оборудован высокоточными датчиками момента и положения, что позволяет роботу точно контролировать силу взаимодействия с окружающими объектами и поверхностями












